
Piloteissa tavoitteena on kokeilla jotain uutta, ja myös epäonnistuminen teknologian parissa voi tuottaa hyödyllisiä tuloksia – esimerkiksi kokemusta siitä, mikä ei toimi. Tässä artikkelissa kuvataan, miksi Base Camp -hankkeessa testattu kevyt ja edullinen tekniikka virtuaalihologrammeille ei vielä tuota riittävän hyvää lopputulosta sovellettavaksi etäläsnäoloratkaisuissa. Lisäksi pohditaan, mikä voisi muuttaa tilannetta jatkossa.
Kuningasratkaisuja etsimässä – laitteisto määrää virtuaalihologrammien laadun
Hologrammien luomisessa kamerateknologia pitkälti määrittää, onko järkevää tallentaa hahmoja kaukaa vai läheltä. Erilaiset kamerat soveltuvat eri tilanteisiin. Kohteen koko, etäisyys ja joissain tilanteissa myös valaistus vaikuttavat lopputuloksen laatuun merkittävästi. Jos tavoitteena on tallentaa ihmishahmo, skannauksen on tuotettava varsin uskottava lopputulos kohteena olevasta ihmisestä.
Microsoftin esittelemän realistisen lopputuloksen perusteella tämä on mahdollista saavuttaa hyödyntämällä väriavaintamistekniikkaa 106:lla kameralla, joita ohjaa 18 erillistä PC-konetta, ja käsittelemällä data eri vaiheiden avulla. Vaiheisiin kuuluu muun muassa tallenteen esikäsittely, pistepilven luonti tallennetuista kuvista, 3D-mallin luonti pistepilvestä, 3D-mallin animaation luonti ja pakkaus striimausta varten. Lopputuloksen laatu on varsin vaikuttava, ja malli on koostettu yhtenäiseksi useammasta pistepilvestä. Todennäköisesti laitteistohankinta pelkästään vaatii useita kymmeniätuhansia euroja, ja asennus vaatii merkittävän työpanoksen.
Karvalakkimalleja käytössä – Base Camp -hankkeen hologrammit vielä rajallisia
Base Camp -hankkeen virtuaalihologrammipilotissa käytössä oli maksimissaan kahdeksan kameraa. Tallennusta rajoitti käytettävissä olevan PC-koneen teho, jolloin lopulta se oli mahdollista tehdä ainoastaan neljällä kameralla. Laitteiston hinta oli muutama tuhat euroa. Käytettävissä olleiden kameroiden tuottama data sisälsi paljon kohinaa, joten 2D-syvyyskuvatietoon sovellettiin kohinanpoistoa, ja sen jälkeen syvyystiedosta projisoitiin projektiopistemallin avulla pistepilvi. Pistepilvessä olevat aukot yhdistettiin varjostinohjelmassa yksinkertaisella yhtenäisyyssuodattimella, joka sai niitä poistettua ainakin osittain.
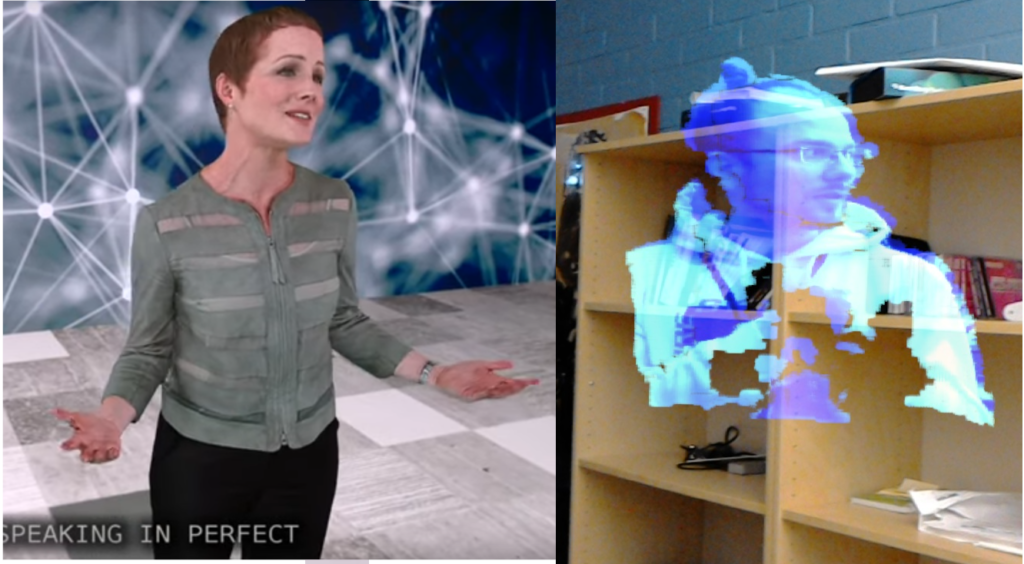
Rajoitusten vuoksi lopputulos arvattavasti jäi Microsoftin tuottamaan ratkaisuun verrattuna heikkolaatuisemmaksi, vaikka visualisointiin sovellettiin hahmopsykologian keinoja hyväksyttävyyden lisäämiseksi . Kuten kuvasta 1 on havaittavissa, lopputulos ei yllä visuaalisuudessa vertailukelpoiselle tasolle pakatun syvyystiedon epätarkkuuden vuoksi, vaikka tallennusaluetta on koetettu pienentää ja siten kasvattaa syvyystiedon tarkkuutta. Mallissa on myös aukko, sillä kohteen toisen käden takaa ei voi lukea syvyystietoa, eikä ratkaisu yritä yhdistää useamman pistepilven dataa kattavaksi 3D-malliksi.
Lopputuloksen parantaminen vaatisi lisäkameroita ja uudenlaista algoritmia
Jos tavoitteena on visuaalisesti hyvälaatuinen etäläsnäoloratkaisu lisätyn laajennetun todellisuuden laseille, sitä ei saa aikaan tässä artikkelissa kuvatulla huokealla tekniikalla. Jos taas tavoitteena on hologrammitallenteiden seuraaminen esimerkiksi puhelimen näytöltä, visuaalinen tarkkuus voi olla riittävä, mikäli hyväksyy malleissa ajoittain esiintyvät aukot. Tosin etäläsnäolo menettää jonkin verran merkitystään kädessä pidettävän älylaitteen avulla tarkasteltuna.
Tallennusympäristö sen sijaan on siirrettävissä melkein minne tahansa kohtalaisella vaivalla. Kyseessä on pelkästään yksi PC-kone sekä neljä jalustallista kameraa. Kameroiden etäisyyksien kalibrointi ja testaus vievät toki oman aikansa, mutta kuitenkin laitteiston pystytys tallennuspaikkaan vie tunteja, ei päiviä tai viikkoja.
Tilannetta voi jatkossa muuttaa esimerkiksi 16-bittisen videopakkausalgoritmin soveltaminen, jonka avulla syvyystietoa olisi mahdollista tallentaa suuremmalla tarkkuudella häviöttömästi. Kameroiden määrän lisääminen auttaisi useampien pistepilvien tallentamiseen, jolloin virtuaalihologrammeista saisi laadukkaampia esityksiä useammasta suunnasta. Tällöin myös pistepilven yhtenäistävän algoritmin toteuttaminen olisi tarpeen, jotta pisteiden määrää saadaan vähennettyä AR-lasien renderöintiresursseihin sopiviksi.
Kirjoittaja
Anssi Gröhn, tietojenkäsittelyn lehtori, Karelia-ammattikorkeakoulu
Base Camp – Opiskelijayrittäjyysalustojen kehittäminen -hanke
Artikkelikuva: Kuvaaja Liam Charmer palvelusta Unsplash